まできました。
今回の部品です。

フロントカバーを取り付ける前にスプラインホーンとサーボのネジを2本抜いておきます。当初抜くネジを間違えて下2本を抜いてしまいました。抜くのは外側の2本です。

フロントカバーをはめ込みます。

ネジを締めてスプラインホーンを取り付けます。

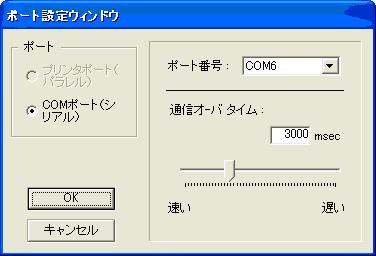
パソコンとシリアルケーブルで接続します。

専用ソフトウエア roboBASIC v2.5 を起動します。USBポートをシリアルポートに変換するケーブルを使っており、COMポートの番号が6だったので、"COM6"を設定します。(COMのポート番号が何番かはデバイスマネージャで確認できます。)
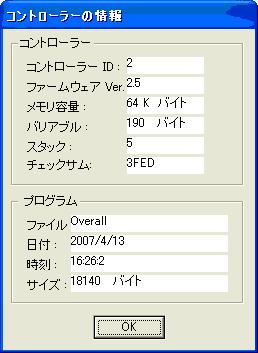
コントローラ情報を表示すると以下のように出ました。
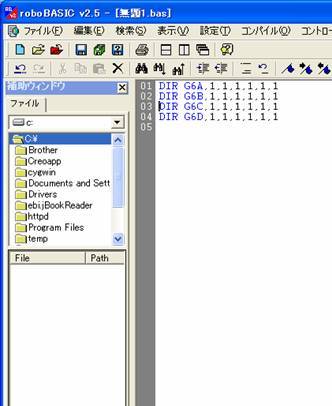
マイコンボードに初期設定プログラムをダウンロードします。
補足:
デバイスマネージャからCOMポート番号の確認方法です。












始めまして、突然ですけど自分は
コントローラーの情報をクリックしてもタイムオーバーの表示が出ます。
何かアドバイスあればお願いします。
ドアラさんコメントありがとうございます。
>コントローラーの情報をクリックしてもタイムオーバーの表示が出ます。
とのことですが、うーーん、ドアラさんのパソコンの詳細がわからないのでなんともいえませんが、シリアルポート経由で正常にROBOZAKのコントローラに繋がっていないとしか言いようがないです。COMポートの番号とか間違ってませんか?USBをシリアルに変換するケーブルを使っているなら取説を見てそれなりの設定をしましたか。
こちらこそありがとうございます。
質問の仕方がアバウトすぎてすいませんでした(汗
アドバイスを参考に、色々と試行錯誤していたら繋がりました。
ありがとうございましたm(_ _)m
(パソコンの知識については初心者レベルなもので、苦労しています。)
自分は49号まで完成させました。
でも初めて電源を入れて基本姿勢を取った時に、いきなり右腰(?)サーボから発煙が!
まだ中身は確認してませんが、
動きがおかしいので交換(新品購入?)しないといけないかも知れません。
最初のサーボの単品でのテストをサボって、たまに飛ばしたのが、
運悪く「当り」だったのかもしれませんね(苦笑)
>でも初めて電源を入れて基本姿勢を取った時に、いきなり右腰(?)サーボから発煙が!
え!、発煙ですか?当該サーボを組み立てる時に配線などにキズを付けたのでしょうか。幸いにも私の方は49号の本体組み立てが終わって始めて電源ONしましたが、特に火は噴きませんでした(汗)。なんかピポとか音がして気をつけの姿勢になったままです。次の第50号で調整作業が入るらしいです。まぁ一つのことをはじめるといろいろ苦労がありますけど勉強にもなりますよね。
火を噴いた原因が分りました。
(前後4個ずつ十字に付ける)2×4㎜のネジを使うところを、2×5㎜のネジで固定していて
ネジ先端がボディーフレームにまで当っていて、過負荷がかかり悲鳴を上げた様です。
1号には、「モーターが加熱し過ぎることのない。きわめて人にやさしい設計がされている」って書いてあったのに…。
でもまあ、やっぱり説明はよく読まないといけませんね(苦笑
(無償交換してもらえるんだろうか…。)
右腰サーボは半死状態ですけど、ゼロ調整したら
たまにコケるけど、一通り(側転以外)のモーションは、できるようにはなりました。
ネジのサイズ、1mm違いが大違いだったのですねぇ…。
実は組んだあとに、途中でなんか微妙に長さが違うな?
って思ったけど誤差の範囲だろうと思いスルーしてしまいましたが
それがこんなことに…。
とりあえずなんとか普通に動く姿は見れたので、まあよかったです。
ロボザックを基本体まで(44号)組み立てましたが、どうしても「roboBASIC v2.5」が立ち上がりません。
私のパソコンは(windows Vista Home プレミアム」です。
XP以外のOSではダメなのでしょうか?
また、Vista に対応した「roboBASIC」のソフトは発売はされておりませんか?発売の予定は?
以上よろしくお願いいたします。
なりまつさんコメントありがとうございます。roboBasicの件ですけど、本にもディアゴの公式HPにもVistaには未対応である旨書かれていますね。→参考
残念ながら現状では2000かXPのパソコンを手に入れるしかないようです。